

Robotmanipulatorlaben tilbyr fasiliteter for testing og verifikasjon av teknologi relatert til baneplanlegging, manipulering, estimering og regulering av robotmanipulatorarmer. Vi har flere robotarmer og en rekke sensorer og kameraer, inkludert et motion capture kamera system. I prosjektene knyttet til laben adresseres utfordringer relatert til baneplanlegging i sanntid som interaksjon med objekter i bevegelse, målfølging og bevegelsesestimering.

Bruk av robotarmer er i dag utbredt for automasjon av enkle og repetitive arbeidsoppgaver, først og fremst i produksjonsindustrien, men det er mange industrisektorer som har et stort innovasjonspotensial ved å bruke robotikk til å automatisere oppgaver.
Vi undersøker bruk av robotarmer i akvakultur- og havbrukssektoren, samt i havn- og shipping industrien, til å gjøre autonome og fjernstyrte operasjoner. Vi forsker også på målfølging og manipulering av objekter i bevegelse i produksjonsindustri. Innen helsesektoren er det også et stort potensial for robotikk og maskinlæring, for eksempel til ikke-invasive undersøkelser.

Et av laboratoriets viktigste forskningsmål er utvikling av sanntidsmetoder for baneplanlegging for å interagere med objekter i bevegelse. Vi har også prosjekter på menneskelig bevegelsesanalyse og gjenskapning av menneskebevegelser med robotarmer for å teste produkter. AR og visuelle tvillinger blir også forsket på i Robotmanipulatorlaben.

Video: Gjenskapning av menneskelige bevegelser med en robotarm i Robotmanipulatorlaben for å teste øretelefoner.
For å kunne samhandle med verden rundt oss er det også nødvendig å kunne oppfatte og forstå den. I laben forsker vi på hvordan man følger og predikerer bevegelsen til objekter, om det er hengende kranlaster, produksjonsdeler eller mennesker. Robuste filtrering- og fusjonsmetoder er nødvendig for å forstå og utnytte all tilgjengelig data fra fler-sensor robotsystemer. Vi har også kompetanse på maskinlæring og undersøker hvordan roboter kan lære sin egen dynamikk, så vel som dynamikken til objekter rundt seg, for å oppnå smart bevegelsesplanlegging i en dynamisk verden.
Utstyr
I laboratoriet har vi flere 6- og 7-DOF robotarmer og en rekke sensorer, som 2D- og 3D-kameraer og LiDARer. VI har også et motion capture kamera system (HiPPo lab), som blir brukt for validering og rask utvikling av teknologidemonstratorer.
Vi har følgende utstyr i Robotmanipulatorlaben:
- UR10e og UR5 6-DOF robotarmer (inkludert gripere)
- Franka Emika Panda 7-DOF robotarm
- Qualisys motion capture kamera system (HiPPo lab)
- RGB og RGB-D kameraer
- Lidarer
- Turtlebot roboter
- 3D-printere (for rask testing av endeeffektordesign og annet utstyr brukt for testing)
Autonome offshoreoperasjoner
Et av laboratoriets forskningsmål er å øke bruken av autonome og robotbaserte operasjoner i havbrukssektoren. Selv om fiskeoppdrett startet i mer skjermede kystmiljøer, er det et økende press for å etablere nye oppdrettsanlegg på steder mer utsatt for vær og vind. Dette fører til økt helse- og sikkerhetsrisiko for arbeiderne, noe som motiverer utvikling av ny teknologi og kunnskap om autonome operasjoner på utsatte oppdrettsanlegg.
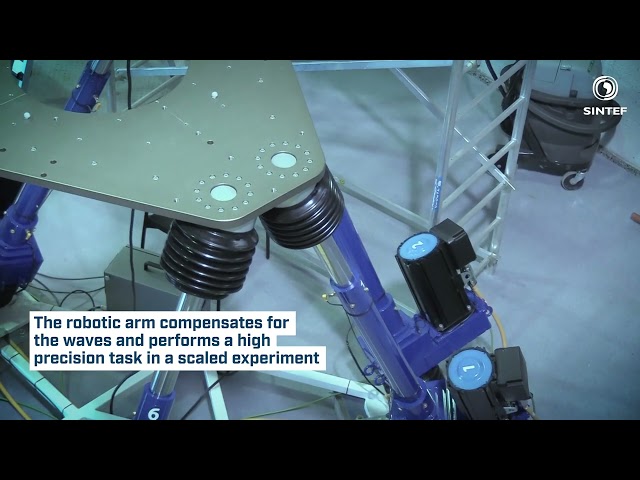
I Robotmanipulatorlaben undersøker vi hvordan man kan bruke fartøysmonterte robotarmer for å utføre autonome operasjoner på merder. Vi tester bevegelseskompensasjon og baneplanleggingsmetoder for å utføre presise arbeidsoppgaver, selv i grov sjø.
Video: Robotmanipulatorlaben utvikler algoritmer for baneplanlegging og persepsjon for å muliggjøre autonome operasjoner innen havbruk, produksjonsindustri og helse.