
- Jeg trodde det måtte være ganske enkelt og «straight forward» å bruke samme teknologi i havbruk som i olje og gass, men fikk en alvorlig vekker under mitt første besøk ute på oppdrettsanlegg, forteller Eleni Kelasidi.
Hun hadde en PhD i slangerobotikk utviklet for bruk i olje- og gassnæringa da hun ble forsker hos SINTEF Oceans avdeling for havbruk.
- Jeg hadde ikke for alvor forstått hvor mye det endrer premissene for operasjoner at alt beveger seg og at arbeidsområdet er fullt av levende dyr. Det er noe helt annet enn å få en robot til å jobbe i åpent hav med stillestående , dødt metall på rørledninger eller turbiner, sier hun.
Etter robotikken gjorde sitt inntog i oppdrettsnæringa, har havbruk stort sett tatt i bruk utstyr som er utviklet for olje og gassnæringa. Kelasidi mener havbruk trenger mer spesialtilpasset robotikk, og har forsket på hvilke løsninger fisken blir minst forstyrret av.
Fiskens egen beregning av sikkerhetsmargin
- Når vi snakker om samspill mellom mennesker og roboter, er det en selvfølge at menneskets behov og sikkerhet har høyeste prioritet. Det samme prinsippet ligger til grunn for prosjektet Fish-Machine Interaction. Vi ønsker å bidra til bedre roboter som kan jobbe raskt og effektivt, men de må selvsagt ta hensyn til fiskens behov og sikkerhet, sier hun.
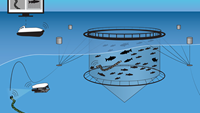
Eleni Kelasidi, post.doc Qin Zhang fra NTNU og resten av teamet har samlet og analysert data gjennom tre år i ulike merder tilknyttet SINTEF ACE. Datainnsamlingen har skjedd på ulike lokasjoner, til ulike tider av året og i ulike livsfaser for fisken.
- Vi har gjort flere ulike målinger per case, så det har vært en omfattende datainnsamling, sier seniorforskeren. Studien gir noen svært tydelige svar, blant annet på hvor stor sikkerhetsavstand fisken legger inn til et objekt.
- Forholdet mellom størrelse på fisk og avstanden de holder til fremmede objekter, er faktisk lineær, og det overrasket oss alle. Jo mindre fisk, jo mindre avstand, sier Kelasidi.
Utstyr som senkes ned i vannet blokkerer i realiteten mer volum enn selve utstyret, og denne sikkerhetsmarginen som fisken legger, har konsekvenser for hvor trangt det blir i merda under ulike operasjoner. På bakgrunn av denne studien kan oppdrettere vite hvor stor avstand fisken kommer til å holde til det utstyret de setter ned. Fisk på fem kg holder f.eks tre meter avstand. At yngre og mindre fisk legger inn en mer beskjeden sikkerhetssone betyr i praksis at det kan plasseres mer utstyr i merda hos ungfisk uten at det påvirker deres svømmerutiner og adferd, sammenlignet med eldre fisk.
Farge, størrelse, fart og lyd har betydning
- Når vi vet hva som forstyrrer eller påvirker fisken, kan vi si noe om hvilke tilpasninger teknologiprodusenter bør gjøre, påpeker Kelasidi, som har funnet ut mer om hva fisken reagerer på og hva den overser.
Forskerne laget objekter i ulik form, farge og størrelse, for å kunne se og kvantifisere eventuelle endringer i fiskens respons. Det viser seg at formen spiller liten rolle: fisken reagerer likt på en sylinder og en kube. De holder imidlertid større avstand til store objekter enn små, og de holder større avstand til gult utstyr enn til hvitt.
Farge og størrelse er altså faktorer som har betydning. Det samme er lyd og fart, som tidligere studier har vist.
- Vi håper teknologileverandører vil bruke dette kunnskapsgrunnlaget når de utvikler nytt utstyr. For oss i forskningsmiljøet er det videre målet å utvikle teknologi som gjør at autonome roboter kan tilpasse sin adferd til fiskens reaksjoner slik at de kan forstyrre minst mulig. Hvis robotens sensorer oppfatter at fisk rømmer unna eller viser noe som roboten kan gjenkjenne som endret adferd og dermed en potensiell stressfaktor, kan den f.eks. senke farten og slik operere mindre forstyrrende, forklarer Kelasidi.
Mål om at robotene selv skal tilpasse seg
- Vi vet foreløpig ikke om det at fisken svømmer vekk fra utstyret er en stressreaksjon, eller om det kan sammenlignes med barn som i en lek vil løpe vekk fra den som jager. Dette må vi forske mer på, sier Kelasidi, men peker på at det uansett er nyttig å vite hvilken adferdsrespons fisken har på ulike elementer.
Skal du utføre en operasjon i merda der du ønsker at fisken holder seg unna, vil det være nyttig å vite hvilken farge den holder størst avstand til. Ønsker du å komme nært fisken med et kamera, vil du produsere roboten i en minst mulig forstyrrende farge.
Foreløpig har forskerne bare testet gult og hvitt, fordi dette er fargene som brukes på dagens utstyr. I det videre skal de også undersøke hvordan fisken reagerer når roboten dreier eller flytter på seg, hvordan fart påvirker, og om det spiller noen rolle om bevegelsen er horisontal eller vertikal, eller med eller uten lys. Kelasidi tar utgangspunkt i at det er et mål å gjennomføre autonome robotoperasjoner med minst mulig forstyrrelse.
- Norsk havbruksnæring er pionerer på å ta i bruk teknologi, og vi håper å bidra med kunnskap som gjør at industrien kan fortsette holde på sin posisjon som verdensledende på feltet. Robotikk som tar hensyn til fiskevelferd berører ikke det mest presserende problemet næringa har her og nå, men det legger grunnlaget for bedre fiskevelferd i fremtidens havbruk, sier Kelasidi. Forskingsprosjektet er finansiert av Norges Forskningsråd, og SINTEF og NTNU har jobbet tett sammen for å utvikle ny kunnskap som kan være relevant for nåværende og fremtidige utfordringer i havbruksnæringa.
