










3D Measurements and Analysis
SINTEF develops advanced, optical systems for the acquisition of 3D data as well as sophisticated methods and algorithms for 3D analysis.

The Computer Vision group at SINTEF develops methods and systems for automatic analysis and understanding of visual data. We work with image and video analysis, 3D analysis, deep learning, generative AI, and 3D measurement technology to interpret information from large amounts of sensor and image data.
We have extensive experience with a variety of sensor types, including cameras in the visible spectrum, UV, IR, X-ray, LiDAR, RGB-D, ultrasound, and specially developed optical sensors.
The research group has specialized expertise in:
We develop solutions that enable autonomy and automation for inspection, monitoring, localization, quality control, and decision-making processes in complex environments.
We combine research in artificial intelligence, mathematics, and sensor technology with practical application in industry. The work is closely linked to the specific needs of customers and partners, with a focus on solutions that function in real operational environments.
We cover the entire innovation process – from idea and method development to testing, prototyping, and implementation. The models we develop in machine learning and deep learning are integrated with knowledge of data from cameras, LiDAR, sonar, and other sensors.
Through laboratories and test facilities, we can evaluate technologies under realistic conditions, including in demanding underwater environments. This enables us to develop robust solutions for situations where standard methods are not sufficient.
Interdisciplinarity is central, and we work closely with other research environments in SINTEF, universities, and industry both nationally and internationally.
What sets the Computer Vision group apart from many other research environments is the combination of deep expertise in both deep learning and sensor technology, along with more than 20 years of experience in developing Computer Vision solutions for industry and startups.
We do not just develop models for artificial intelligence – we build comprehensive solutions where sensors, data capture, analysis, and decision support are seamlessly integrated into operational environments, in close collaboration with the research group Applied Optics. This gives us a particular strength in demanding application areas such as underwater operations, industrial inspections, and autonomous systems.
The research group has extensive experience in developing technology that works under challenging lighting conditions, limited visibility, or in environments with significant variations in data quality. Robustness and reliability are central to our research.
Some of our clients are: ZIVID, Stellaire, EXACT Geo, SCOTDI, TKS AGRI, Railway Robotics, KVS Technologies, SpinChip, Axtech, NORBIT, Kongsberg Discover, Jotun, Polyfemos, TOMRA, OceanTech, Mjøs, Mustad, Wingtech, Steinsvik, Maritime Robotics, IKM, Agnes.
The Computer Vision group participates in a number of international research projects and collaborates with leading research environments and industry partners in Europe and the rest of the world.
We contribute to projects funded by, among others, the EU and the Research Council, and our research is published in international journals and conferences within artificial intelligence, image analysis, and robotics.
The group collaborates with stakeholders in marine technology, industry, mobility, construction, logistics, and maritime, and several of our solutions are used in international operations and research collaborations.
Do you want to automate inspection or monitoring using cameras and artificial intelligence? Do you have large amounts of image or video data that are challenging to analyse manually? Do you need robust solutions for demanding environments at sea, in industry, or in autonomous systems?
We can help you with:
We tailor research and technology to your needs – whether you want a research collaboration, a prototype, or support for implementation and testing.
We are always open to new collaboration opportunities. Contact us to learn more about our research and how we can develop solutions together for the industrial and societal challenges of the future.
You can collaborate with us through research projects, piloting, technology development, strategic consulting, or competence building. We work with both industry, public sector, and academia, and we also welcome guest researchers and international partners.
SINTEF develops advanced, optical systems for the acquisition of 3D data as well as sophisticated methods and algorithms for 3D analysis.
Image analysis is the extraction of meaningful information from two-dimensional (2D) or three-dimensional (3D) digital images using digital image processing techniques.
Smart design of sensors and onboard AI enables safer, more capable, and more efficient autonomy for unmanned ground vehicles and drones.
Automatically analyzing video to detect and determine temporal and spatial events has a multitude of use cases in a wide range of domains such as entertainment, health-care, retail, automotive, transport, home automation, flame and smoke detection...
The aim of robot vision is to make a wide range of robot platforms able to interact with the world around them through visual inputs.
The computer vision group develop AI-based vision systems based on extensive understanding of the image generation process and cutting-edge machine learning algorithms. We specializes in developing robust and trustworthy deep learning networks for a...
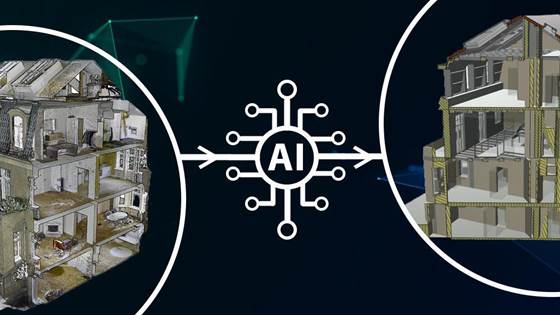
The DigiBygg project aims to achieve fast and cost-effective production of detailed digital building models, which will promote broader adoption of digital processes in the building sector.

Improve occupational health and safety conditions within the ship recycling industry. By leveraging state-of-the-art robotics, computer vision, and artificial intelligence systems, we aspire to revolutionize traditional methodologies while promoting...

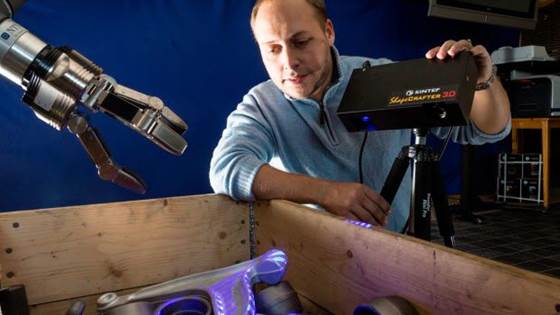
DeepStruct will enable a significant increase of automation within logistics and automation through developing 3D cameras capable of imaging transparent and other challenging objects.

Robots need eyes also in space. In this project, we develop a high-resolution 3D camera for space applications. In addition to superb measurement qualities, ESA requires a compact, simple, robust and low-power design.

The vision for this project is to develop a fully digital process for inspection of indoor industrial assets based on an intelligent, tethered drone system that eliminates the need for human entry to confined and often dangerous spaces. The system...

Develop a system for automatic interpretation of sounds, facial expressions and body gestures of people who cannot speak.

The primary goal of the project is to develop a sensor suite and algorithms that will enable the detection and classification of critical faults – those that can cause power outages – even in poor visibility conditions.

Develop a compact and easy-to-use retinal camera for early screening of diabetic retinopathy.

The central R&D challenges within this project focus on the use of machine learning techniques and cloud-based services to deliver more user-friendly and robust 3D camera solutions.

The FeedCarrier project will develop an automatic feeding system that analyses, fills, and distributes feed fully automatically, thereby reducing manual labour and improving safety for the farmer as well as enabling precise control over the timing...

SMARTFISH H2020 is an international research project which aims to develop, test and promote a suite of high-tech systems for the EU fishing sector. The goal is to optimize resource efficiency, improve automatic data collection for fish stock...
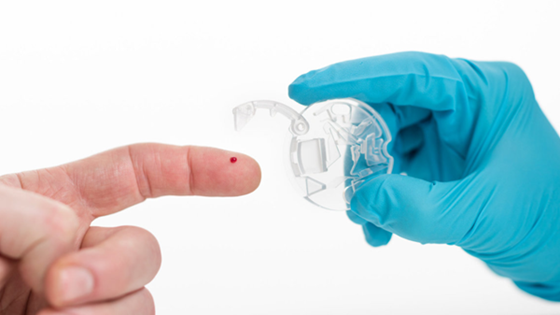
We will enable scalability in number of robust high-quality assays to be developed for SpinChip's diagnostics platform by combining microfluidic simulations, advanced computer vision and state-of-the-art machine learning.

The primary objective of the DroneSAFE project was to develop a professional-quality cinematography solution for action and adventure sports in an affordable, safe, and easy-to-use consumer drone platform.
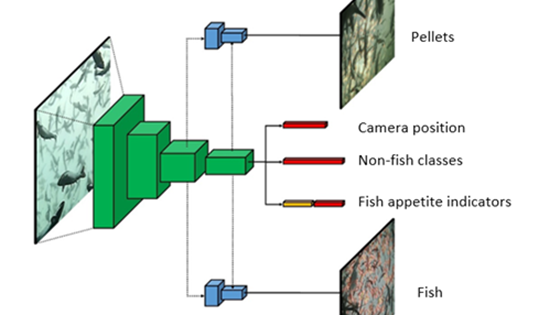
Good control when feeding farmed salmon in sea cages is essential. The growth potential is not met with too little feed, while too much feed is bad for both economy and environment.

Klassifisering av slakt skal være en objektiv vurdering av slaktet som er basert på sammensetningen av kjøtt, fett, og bein. Per i dag er klassifiseringen et viktig grunnlag for pris til bonde og industri. Prosjektet har utviklet instrumentering og...
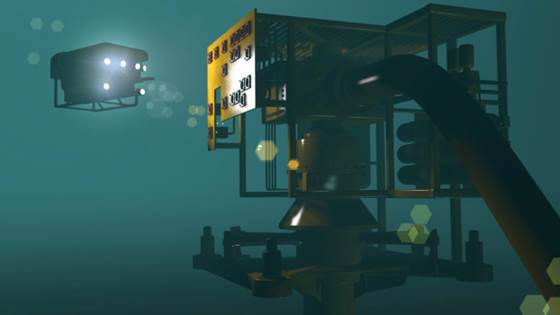
A new subsea camera has been developed that can see two to three times further under water than existing cameras and calculate distances to objects. This will make work carried out under water much easier.

In Flexi3D we will develop new technologies that can meet industry needs: a rapid and precise pick, place & verify solution that enables profitable future automation solutions.
I3DS project intends to develop a generic modular Inspector Sensors Suite (INSES) which will be a smart collection of building blocks and a common set of various sensors answering the needs of near-future space exploration missions in terms of remote...

The goal of the "Meet easy" project was to provide a complete, easy-to-use videoconferencing solution delivering high-end features such as high-quality audio and video with a wide field of view – in a compact form and at a fraction of the cost...

Researchers have developed a robot that adjusts its movements in order to avoid colliding with the people and objects around it. This provides new opportunities for more friendly interaction between people and machines.

A 3D camera developed in Norway may be the first in the world that can film in all directions.
The robots of the future must be able to adapt to changes in their surroundings. Some of them will be in close contact with people. At the very least they must be able to see properly – in three dimensions, just like us.
The primary objective of this project is to develop new technology and processes for increased safety and efficiency in nuclear decommissioning in Norway and abroad.

PILOTING is aiming to increase the efficiency, safety and quality of inspection and maintenance activities. The primary application will be in civil infrastructures such as tunnels and bridges, as well as refineries.