SINTEF Digital Robot Manipulator Lab
The SINTEF Digital Robot Manipulator Lab in Trondheim is a space where perception and motion planning methods needed for increased autonomy are researched and tested.

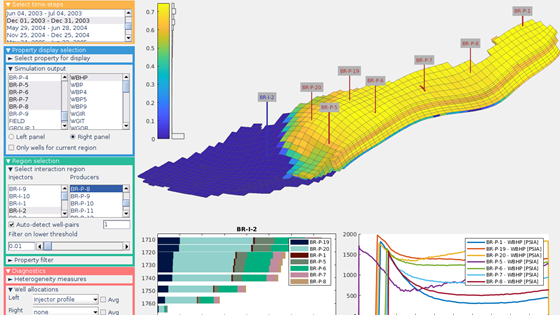
The primary objective for the project is to contribute to increased recovery from the NorwegianContinental Shelf by developing new flow-diagnostic methods that reduce the turnaround time to design andoptimize waterflooding and water-based EOR schemes

The goal of the SmartPower project is to demonstrate the usefulness of modern optimisation methods for demand response applications in energy markets. To this end, we develop a prototype for optimised power matching/load balancing in large scale...

In the DynamITe competence project, we developed new models, solution methods, and basic software for optimized transport of goods and people in an ever more dynamic world.

We don’t just want the best. We want the very best.

A Norwegian, satellite-based system aims to ensure that helicopters and light aircraft are prevented from colliding with power lines and other obstacles.

International IT researchers have limited contact with the industry, and tend to stay in their offices, working on concepts and studies. Norwegian researchers work closely with companies – and win awards