
“We bump into challenges all the time, and we experiment with various techniques.”
Erik Kyrkjebø lowers his hands to his side and looks down. On the floor in front of us lie Aiko, Anna Konda, PiKo and Kulko.
“Our hope is that that we will be able to train them to receive information, process it, utilize it and learn once and for all. So far, we haven’t got that far”, says Kyrkjebø.
Anna Konda lies in a heap of red and white. Just beside her shines Aiko’s polished cranium: the seven-kilo rascal can’t even be bothered to lift his head today. PiKo is partly hidden in a corner. They all look innocent enough as they lie perfectly still. And they are definitely not listening to what we say.
World-class snake robotics
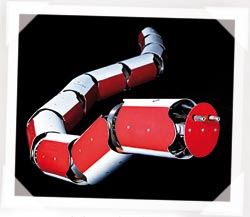
Anna Konda (5 years old) is the mother of the family.
Photo: Geir Mogen
Click to open
Japan has its guru, and the US has a first-class milieu. But apart from these two countries, NTNU and SINTEF are far advanced in world terms as far as snake robotics is concerned.
“We are the biggest in Norway in this field. More than 20 people are working in robotics, which is an area of special focus at SINTEF ICT”, says Kyrkjebø’s colleague Ingrid Schølberg, who tells us about robots used in the manufacturing industry. Robots that grip and lift, fetch and move things.
About health-care robots that are developing into a new field, where robot assistants can help elderly people to live for longer in their own homes. First and foremost, however, the department deals with service robots that are used for inspection and maintenance tasks. They do not produce anything, but perform tasks that we humans have problems with.
“For example, they may be put into pipes in order to locate problems. They can get into odd places. Or dangerous one, like fires. We are fairly geared to this business of pipes and pipework inspections. We believe there is a market there.”
“What is your vision, and the idea that lies behind all this?”
“If we are talking about robotization in general, Norwegian industry lies disgracefully far behind other countries. Sweden is putting twice as much effort into automatic control as we are. Countries such as India and China have started the robotization process. We need to recruit to robot science and ensure that help is made available to industries that are exposed to competition”, says Ingrid Schølberg.
Kyrkjebø adds: “The snake robots provide us with specialist expertise in motor systems and in how mechanical and electrical units can be integrated. We aim to develop core competence and create a platform with control systems that can be used in several different practical applications.”
Family mother
It started with Anna Konda. News about SINTEF’s snake robot that could save lives spread like wildfire in the media in the spring of 2005. Chinese, American and Brazilian newspapers and websites wrote about the Norwegian robot that could climb stairs, get past beams and sneak round corners, always in order to perform lifesaving missions in the event of fires or explosions.
“Gripping an object is a simple task for a human being. Programming such a task and transferring it to a robot is more difficult.»
Senior Scientist Erik Kyrkjebø
Behind the prototype of the first snake robot lay an MSc dissertation and a year-and-a-half of work in the cybernetics groups at NTNU/SINTEF. This has since resulted in a number of doctoral theses in this field, and NTNU’s Professor Kristin Pettersen has played and still plays an important role here.

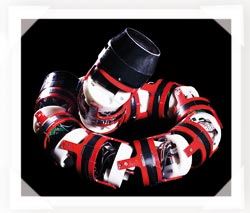
Kulko, the youngest, overcomes abstacles and make his own decisions.
Photo: Geir Mogen
Click to open
Anna Konda has 20 hydraulic motors that actuate the joints in its 75 kg body, with many valves to control the flow of hydraulic fluid to the motors. Each of the robot’s modules contains two hydraulic cylinders and two valves. The steel outer cladding also contains linking modules that can move in two axes.
“We developed Anna Konda in order to demonstrate the SnakeFighter concept. As far as we know, she is the biggest and strongest snake robot in the world, as well as the first hydraulic snake robot ever built”, says Erik Kyrkjebø proudly.
“The SnakeFighter concept?”
“Yes, that was the name of the project. It was due to a question that a former colleague asked us: Why couldn’t we create a fire hose that would crawl into a burning house and put out a fire by itself? Since we didn’t have a good answer to the question, we decided to do just that.”
Hydraulic fire hose
The scientists’ idea was to equip a fire hose with a hydraulic system. The strength of the powerful water flow would enable the hose to move on its own. Its advantage over a robot with wheels or legs would be its robustness and ability to penetrate difficult environments.
After four years the team have still not reached their goal, but they have great faith in the underlying concept of Anna Konda.
“The ingenious aspect of Anna Konda is that the energy that the snake robot needs for movement is already present in the fire hose: water at 100 bar pressure. And of course the water itself is the extinguishing agent”, explains Kyrkjebø.
Experimentation
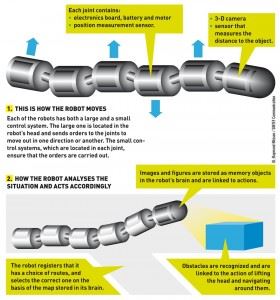
The Trondheim robots are similar to large-scale control systems, and they take their power from cables or batteries. A large system controls the overall movements of the robot, while a number of small systems control its individual joints. Every joint contains a small electric motor and a printed circuit board that reads information from the external world. The joints are interconnected, and each module can communicate with the others.
“We feed the boards with information about what we want the robot to do”, says Schølberg. “We draw up an equation for the overall movements, and one for each of the small units, in which we specify the speed and position of the joint.”
“Yes, and we also use feedback from the robot itself for real-time control”, adds Kyrkjebø. “The difference between what the robot has already done and what we want it to do tells us the amount of motive power required, if you see what I mean…??
“Well, no…?”

One-year-old Piko climbs up vertical pipes.
Photo: Geir Mogen
Click to open
“It’s as if you were driving at 70 kilometres an hour and want to get up to 80: you need more power so you step on the accelerator.”
In the course of the four years since 2005, that single snake robot has turned into three or four. The family has grown because the robot scientists needed more knowledge that could be transferred back to the original model. Aiko came in order to find out what sort of electronics Anna Konda needed, and to make it easier to carry out experiments.
It is easier to supply power to seven kilos than 75. For a good while, Aiko acted as a platform for testing the mathematical equations from the large unit until the smaller system worked properly, but eventually the limits of learning were reached. Now Kulko has arrived and will function as a platform for implementation.
“Kulko is not quite as stupid as the others”, as Erik Kyrkjebø puts it, meaning that this robot is fitted with power sensors that measure all its contact with its environment. This enables it to adapt its progress according to what it “feels”, giving it the potential to become more intelligent and learn to make its own decisions, according to its tutors.
Climbing robot
PiKo is the robot that has taught the scientists most about vertical movement. It climbs up tubes, and when it is in a vertical position it can propel its way up a pipe-wall. The cybernetics experts have been working on its propulsion system, while optics researchers have given the little robot “vision”.
PiKo differs from the other members of the snake family in that it moves on wheels, although, like its siblings, it is jointed.
“These snake robots have made us experienced in controlling jointed mechanisms,” comments Kyrkjebø, “but we also need experts who can help us with vision, which is why we are collaborating with experts from the Department of Optical Measurement and Data Analysis, and get help from them.”
“PiKo is designed to be able to cleanse ventilation systems and check leakages in pipework with diameters as small as 20 cm, both vertically and at junctions”, explains Jens Thielemann. “So far, we have managed to develop a propulsion system, and a 3D camera combined with a map and position recognition enable it – and us – to compare the map using the robot’s sight to see whether it is on the right track.”
“Can it modify its movements and progress on the basis of sight?”
“We have managed to link the propulsion and visual systems, but not to store the data in such a way that the robot can learn anything new.”
Learning
It is a long way from a regular robot to an intelligent robot. Gripping an object, for example, is a simple task for a human being. Programming such a task and transferring it to a robot is more difficult.
At four years of age, Aiko has tested out mathematical equations.
Photo: Geir Mogen
Click to open
“A robot needs six degrees of freedom of movement”, explains Kyrkjebø: Moving up or down; left or right; forwards or backwards; tilting forwards or backwards; turning left or right; tilting side to side “When we grap a door handle, for example, we need to be able to twist and rotate our hand.”
It is not sufficient for the robot just to be capable of moving forward and getting past obstacles. It also needs to be able to move independently around in its surroundings”, says Ingrid Schølberg.
“How do you manage to do that?”
“Well, we need to supply the robot with visual information via its camera and sensors.”
The robot needs to compare the visual impressions that it captures in the present with its images and memories in its “experience base”, a little database in its head that houses memory, decision-making circuitry and interpretation of sensor data. This might be an action that the robot has been trained to perform, a map, or images of lines and geometric figures that the scientists have input to the database.
In the database, images are connected together to create an action. When the robot checks whether it has seen a particular image before, and the answer is positive, the appropriate action immediately takes place.
“This is similar to what takes place when we humans see a door”, says Kyrkjebø. “From our own experience, we know that we should turn the handle. Even though doors look different and the handle may be high or low, we realize that the same type of action must be performed. We may have to test a swing door the first time we see one, but after a short learning process, that goes well too. That is how learning ought to take place in robots too.”
Huge orange robot arm
At NTNU/SINTEF, there is more to robots than just snakes. Down in a basement laboratory in one of the “electro-blocks” on the Gløshaugen campus, Pål Liljebäck sits facing a handful of vivid PC screens. Behind the screens is a glass wall, and behind the glass a huge orange robot arm is moving slowly around.
Ill.:Raymond Nilsson / SINTEF Communication
Click to open
Statoil/Hydro has financed a major robot laboratory at SINTEF/NTNU in order to develop a new concept for a remote-controlled offshore platform developed by 2015. In a few years we may be seeing a similar arm and robot system in action on an unmanned platform in the North Sea.
Two years ago, a Gemini Centre for advanced robotics was set up at Gløshaugen. The Centre will focus on the best in robot technology. It currently employs six professors and 15 researchers.
“This year, we were awarded a major project by the Research Council of Norway: Next-generation robotics for Norwegian industry”, says Ingrid Schølberg.
“What I like about our snakes is that they give us valuable knowledge about both motor systems and materials technology”, concludes Kyrkjebø. “Of course, we are the robots’ teachers, and by and large, they do what WE tell them. But it is just the same as with children: you learn a lot just by being together!”
Åse Dragland
