|
Non-disruptive fish weight estimation
The objective is to assess and demonstrate the feasibility of automatic analysis and estimation of fish weight distribution based on images obtained from the AkvaGroup VICASS system.
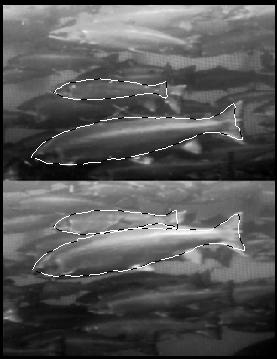
Knowing the total amount of fish and the distribution of the weight of the fish in the cage is a critical factor for monitoring the growth and well being of the fish, for optimal feeding of the fish, and for planning of slaughter. This project aims at developing an instrument for semiautomatic measurement of the fish weight distribution throughout the growth period from smolt to slaughter. The instrument will use a stereo camera system and automatic image analysis to identify and estimate the fish weight from the images. Images will be captured randomly at several locations within the cage. The number of locations and the number of images from each location should be sufficient to get a statistically representative sample of the total population. The presence and outline of the fish in the images are determined automatically by image analysis and the weight of the fish is estimated based on the measured fish area. The image analysis is very challenging due to the tendency of the salmon to move in dense schools, the high degree of overlap between different fish in the images and the low contrast between the foreground and the background fish. Figure 1. Two fish identified from a stereo image pair. The rear fish is partly occluded in the lower image, causing the identification of the tail part to be inaccurate. By comparing the shapes over several images from a video sequence, such errors can be detected and removed.
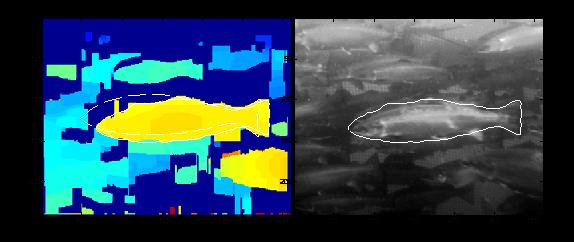
We investigated the potential that lies in the use of short sequences of images (video) in order to obtain a more reliable segmentation of the fish, and to verify the accuracy of an identified fish. Modern image analysis techniques are used, including variational image processing (optimization by means of partial differential equations), level sets segmentation and statistical shape variation models. The project aims to first develop a semi-automatic version of the system where each identified fish need to be verified by manual inspection before the fish is accepted, whereas the long term goal is to develop a fully automated instrument that can measure continuously over longer periods. Figure 2. Examples of intermediate results from the analysis. At the left is shown the identification of the different fish in the image based on a computed range image (different colors represent different distances to the objects). We see clearly two yellow and a green fish. To the right is shown the starting point for the final search for a fish outline.
|
Project leader
Erling S. Skjevrak (AKVA group)
Partners
AKVA Group ASA |