|
Fish behaviour modells
Mathematical modelling of fish behaviour and physiology in aquaculture. Potential application areas for such models include predictive tools for production planning and model-based in silica estimation of e.g. biomass in sea-cages.
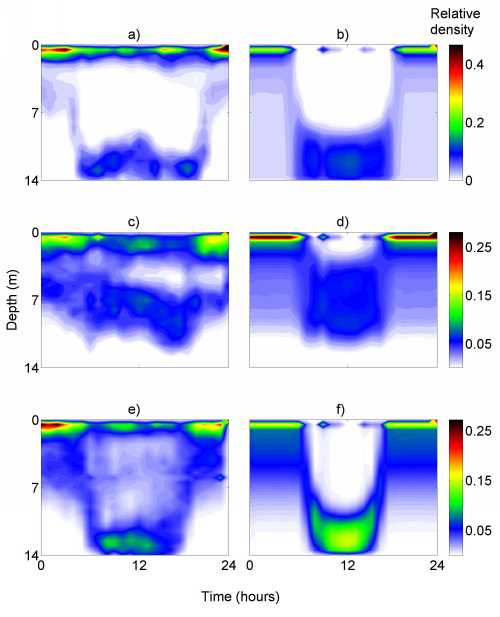
Background Performing experiments with live fish to investigate the interactions between fish and the environment is a time-consuming and expensive process. Furthermore, since some of the conditions mentioned above are outside human control (e.g. water temperature), it may sometimes be difficult to produce the desired environmental conditions. Mathematical models that replicate how caged fish interact with their environment may therefore represent valuable tools for research and development of new technologies. Our focus is to develop mathematical models of the behaviour of finfish in aquaculture facilities. Methods The modelled fish are affected by an external environment comprised of water temperature, light intensity, food concentration, the sea-cage structure and other individuals. These factors have been demonstrated to exert an effect on fish behaviour. Since we focus upon modelling the behaviour of the fish, the main states in the model are position, orientation and swimming velocity. Hunger is known to exert an important effect on behaviour, thus we have also included a state monitoring the stomach content of the fish. The model is developed as a stand-alone JAVA-application giving full flexibility in terms of including new model features. Furthermore, the object-oriented nature of JAVA is very suitable for developing individual-based models. Results and Discussion Figure 1. Observed and simulated vertical distribution of salmon in a sea-cage for thee periods in autumn. a), c) and e) represent observations for periods 1, 2 and 3, while b), d) and f) are corresponding model estimates. The ability of the model to predict the general pattern of distribution in the cage implicates that the modelled behavioural mechanisms were similar to those actually present in live fish. We assumed that the interaction between individual fish was driven by a desire to avoid collision with conspecifics. This resulted in two simple behavioural rules; 1) avoid neighbours getting too close, and 2) align with fish that are close but outside the avoidance range. Together with the rule that programmed the fish to avoid hitting the cage structure and a stochastic disturbance on the swimming velocity vector, these behavioural rules were seen to be sufficient for inducing schooling behaviour in an initially dispersed and unorganised group of fish. Simulation of fish behaviour in net cages (movie .avi): Atlantic salmon; facultative schoolers? The present work on this project concerns including behavioural responses toward artificial light sources submerged in the cage. This is a technique used to prohibit maturation of fish in sea-cages and has been proven to elicit behavioural responses in fish. By using a model to predict the behavioural responses of artificial lights at different depths and under different environmental conditions, it may be possible to predict the environmental conditions under which management and use of artificial light sources is most effective. |
PhD fellow
Martin Føre
Supervisor
Jo Arve Alfredsen (Dept. of Engineering Cybernetics, NTNU) Co-supervisors: |