You are here:
MRST
/
Modules
/
Fully implicit solvers based on automatic differentiation
/
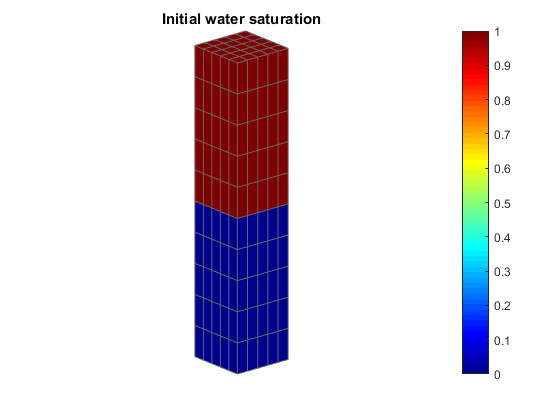
Gravity segregation