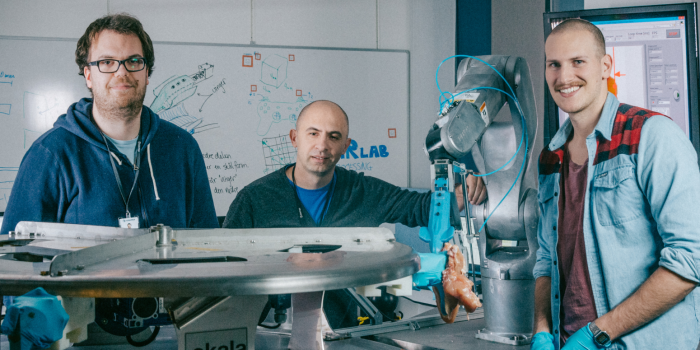
I dag står en fiks ferdig robot som automatiserer prosessen med å fjerne brystfileten fra en kylling på laben. Til vanlig skjer det ved hjelp av øvede menneskehender.
– Målet vårt er å automatisere absolutt alt som kan automatiseres i en produksjonslinje for næringsmidler, sier Ekrem Misimi i SINTEF.
Det skal gjøre norsk matproduksjon mer bærekraftig, både med tanke på lønnsomhet og råstoffutnyttelse.
Robot med falkeblikk og silkelabb
Ekrem er teknisk kybernetiker, har en doktorgrad i maskinsyn og har spesialisert seg på å gi roboter falkeblikk i tre dimensjoner. Rettere sagt; blikk for kyllingens anatomi, i denne sammenhengen.
Slik lærer GRIBBOT å gripe kyllingfiletene nøyaktig:
- Et transportsystem fester skroget og frakter kyllingen fram til 3D-maskinsyn og robot.
- Robotarmen er utstyrt med gripeverktøy. Griperen består av to plater hvor den øverste er spiss og ettergivende for å muliggjøre skraping av kyllingfileten fra skroget. 3D-synet (via kamera og algoritmer) gjenkjenner/finner ut nøyaktig hvor roboten skal gripe fileten.
- Når skroget skannes, identifiserer et spesial-designet dataprogram griperpunktet. Dataprogrammet omsetter posisjonen til dette punktet til en robotbevegelse som fjerner fileten. I samme sekvens skrapes restene av kyllingfileten fra skroget, slik at alt kjøttet utnyttes.
– Å gjøre denne prosessen automatisk er det enda ingen som har klart i verdenssammenheng. Bortsett fra oss, da, sier forskeren, ubeskjedent.
Vi i SINTEF er det eneste miljøet i Norge som jobber med å løse slike problemstillinger for matindustrien, legger han til.
Et av resultatene er så langt er roboten Gribbot, som har fått navnet fordi den kan minne om et fuglenebb.
Gribbot er godt utstyrt: Den har fått en gripehånd med spesialutviklede “fingre” og tredimensjonalt syn. “Øynene” har den lånt fra et 3D kamera som ikke er ukjent for spill-entusiaster; Microsoft Kinect 2.
En kyllingfilet er nemlig en fintfølende sak, og det er helt nødvendig at den behandles forsiktig, slik at ikke den får merker eller kvalitetsfeil etter robot-hånden. Da er robotens syn og gripehånd kritiske faktorer.
Blank og glatt
– Generelt er det veldig utfordrende å få en robot til å bearbeide biologisk råstoff, fordi man er nødt til å automatisere noe som utføres av øvede mennesker. Råstoffet varierer også både i størrelse og egenskaper. En kyllingfilet kan lett deformeres og få skader, forklarer forskeren.
I tillegg er fileten et veldig reflekterende objekt, fordi den er så glatt. Det gjør det vanskelig å ta gode 3D-bilder med alle detaljer intakt. Teksturen gjør også at kjøttet er utfordrende å få tak på.
– Vi viste om dette tidlig da vi begynte forskningen vår og var bestemt på å utvikle en tilpasningsdyktig løsning, som både kan takle variasjonen i råstoffet og de mekaniske utfordringene med å fjerne fileten fra kyllingen, understreker Misimi.
Matematisk “hjernekirurgi”
Selve styringen av roboten er naturligvis sentral. Algoritmen, altså den matematiske regnemodellen som er robotens hjerne, har også blitt til hos SINTEF. Den sørger for at roboten kan utføre operasjonen på lik linje med et menneske.
For å kunne styre robotarmen nøyaktig fram til råstoffet ved hjelp av 3D bildene, er det viktig at kameraet (øynene) og roboten “snakker samme språk”.
– Koordinatene som maskinsynet finner, må med andre ord være forståelige for roboten i sitt koordinatsystem, forklarer forskeren.
For å løse dette kalibreres roboten i forkant, slik at “øye” og “hånd” forstår hverandre.
Til siste restFAKTA:
- I prosjektet CYCLE skal industri og forskere samarbeide om å utnytte mat som i dag ikke når butikkhyllene. Hvert ledd fra produksjon til prosessering skal optimaliseres – og hver ressurs skal utnyttes til siste trevl.
- Prosjektet, som har en ramme på 50 millioner kroner over fire år, startet i 2013 og ledes av SINTEF Fiskeri og havbruk.
- Restråstoff fra sjømatindustrien i Norge i 2011 er estimert til 816 000 tonn, mens slakteavfallet fra kjøtt- og fjørfeindustrien utgjorde 220 000 tonn. Tallene understreker at dette prosjektet kommer til å bli viktig sett fra både et økonomisk, miljømessig og samfunnsmessig perspektiv. Nå skal forskerne gå til verks med verktøy som sensorteknologi, robotisering og mer miljøvennlige prosesser for å utnytte både svinn fra produksjon og mat som forbrukerne i dag kaster.
- Arbeidet med CYCLE har bred støtte fra politisk hold: Ifølge Landbruks- og matdepartementet bør reduksjon av matavfall bli et av de høyest prioriterte miljøområdene både i Norge og globalt. Kretsløpstankegang med best mulig miljøvennlig utnyttelse av bioråstoff med verdiskaping som fokus, er et tema høyt på dagsorden både nasjonalt og globalt.
- For å lese mer om prosjektet og se intervju med noen av prosjektpartnerne så gå på prosjektets egen nettside: www.cycleweb.no
FAKTA:
- I prosjektet CYCLE skal industri og forskere samarbeide om å utnytte mat som i dag ikke når butikkhyllene. Hvert ledd fra produksjon til prosessering skal optimaliseres – og hver ressurs skal utnyttes til siste trevl.
- Prosjektet, som har en ramme på 50 millioner kroner over fire år, startet i 2013 og ledes av SINTEF Fiskeri og havbruk.
- Restråstoff fra sjømatindustrien i Norge i 2011 er estimert til 816 000 tonn, mens slakteavfallet fra kjøtt- og fjørfeindustrien utgjorde 220 000 tonn. Tallene understreker at dette prosjektet kommer til å bli viktig sett fra både et økonomisk, miljømessig og samfunnsmessig perspektiv. Nå skal forskerne gå til verks med verktøy som sensorteknologi, robotisering og mer miljøvennlige prosesser for å utnytte både svinn fra produksjon og mat som forbrukerne i dag kaster.
- Arbeidet med CYCLE har bred støtte fra politisk hold: Ifølge Landbruks- og matdepartementet bør reduksjon av matavfall bli et av de høyest prioriterte miljøområdene både i Norge og globalt. Kretsløpstankegang med best mulig miljøvennlig utnyttelse av bioråstoff med verdiskaping som fokus, er et tema høyt på dagsorden både nasjonalt og globalt.
- For å lese mer om prosjektet og se intervju med noen av prosjektpartnerne så gå på prosjektets egen nettside: www.cycleweb.no
Utviklingen av Gribbot har skjedd som et ledd i et større prosjekt, CYCLE. Hovedmålet er at å gjøre norsk matproduksjon mer lønnsom, mer miljøvennlig og mer effektiv, enten det er fisk, grønnsaker eller kjøtt. Rettere sagt mer bærekraftig.
– Det er jo slik at nesten halvparten av maten som produseres i dag aldri når forbrukeren på grunn av svinn langs produksjonskjeden og manglede teknologi for håndtering og bearbeiding av råstoffet, sier forskeren.
Mer miljøvennlig og mer lønnsomt
– Automatiseringen av dette arbeidet gjør samtidig produksjonen raskere og mer effektiv. Det betyr at vi frigjør kapasitet hos produsenten, samtidig som vi tar vare på råstoffutnyttelsen. Når det gjelder kyllingfileten blir også den optimalt utnyttet: en fleksibel griper skraper skroget mens den river av fileten, for å utnytte mest mulig av kjøttet, forklarer Misimi.
Tanken er å videreutvikle Gribbot i kommende prosjekter for å kunne muliggjøre utnyttelse av kjøttet som eventuelt blir igjen på kyllingskroget etter at fileten er “høstet” av roboten.
