|
|
You are here:
Extreme Conditions
/
Work packages
/
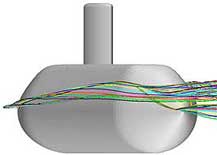
Underwater Vehicles