GeoScale - Direct Reservoir Simulation on Geocellular Models
|
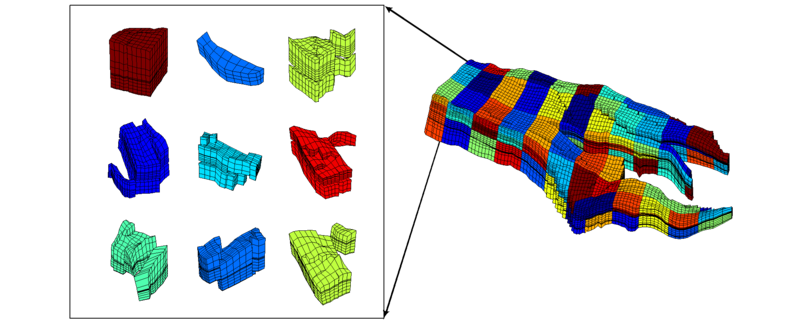
Corner-point grids
The multiscale method is very robust with respect to the coarse grid. For corner-point grids, the simplest, and most accurate, method to generate a coarse simulation grid is by a regular partitioning in index space (i.e., using the logical ijk numbering of the grid cells). This way, one can make sure that the coarse blocks follow the geological structures in the grid and obeys the modelling assumptions used to build the model. Equally important, using a partitioning in logical space enables the coarsening to be automated in a straightforward manner.
Key steps in the multiscale method
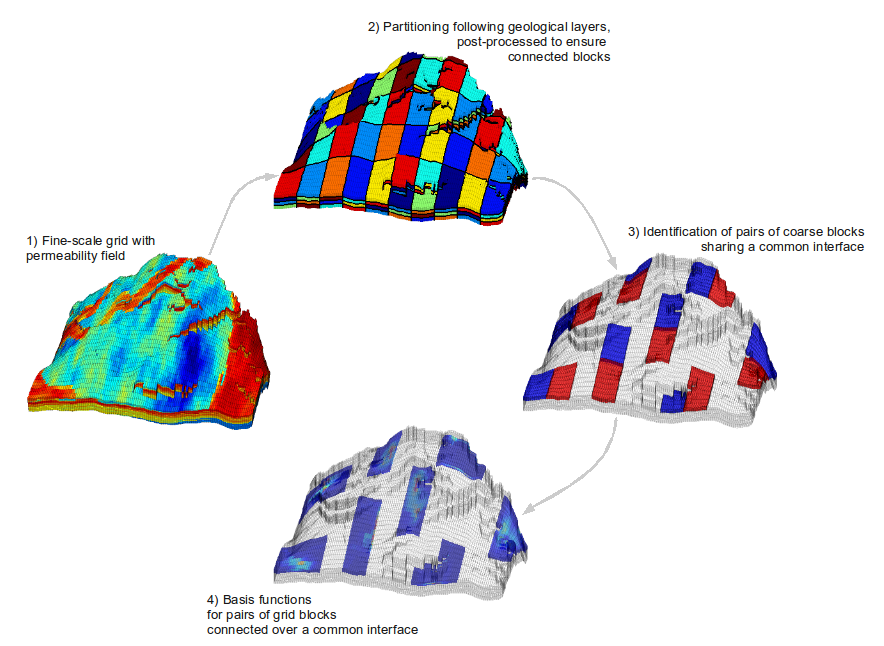
Fig 1: Key steps in the multiscale method illustrated for a model from the SAIGUP study.
|
||||||