![]()
![]()
|
Robotics for oil & gas platforms
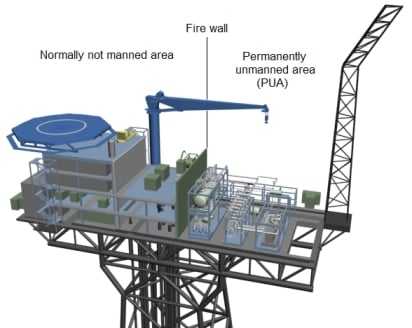
The Norwegian oil and gas company StatoilHydro has developed a new concept for a remotely operated oil & gas platform located offshore. The goal is to develop this platform within 2015. In order to support research on robotic and instrumentation systems for this platform concept, StatoilHydro has cooperated with SINTEF and financed a robotic lab facility in Trondheim.
A remotely operated platform must be equipped with intelligent and reliable robotic and instrumentation systems that enable operators located onshore to monitor and control all processes taking place on the platform.
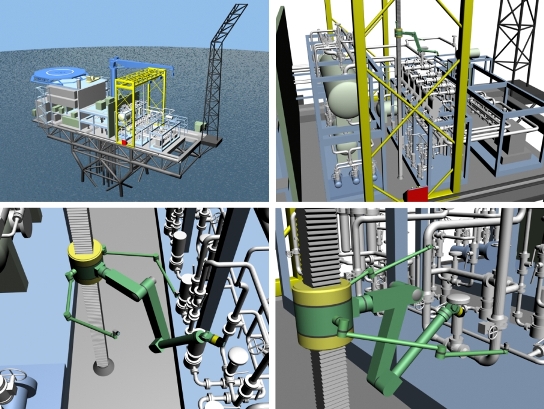
The idea behind the platform concept is to install large modular process sections in a completely unmanned area of the platform. There will be open corridors between each rack of process equipment in order to allow access by one or more robotic manipulators. These manipulators are positioned by a large gantry crane that moves above all the process sections as seen in the illustration below. The illustration also shows two smaller manipulators attached to the base of the main manipulator. These are meant for carrying video cameras and lights, thereby giving operators on shore a satisfying view of the work area.
In order to support research on robotic and instrumentation systems for this platform concept, StatoilHydro has financed a robotic lab facility in Trondheim. The lab has been developed by the Gemini Centre for Advanced Robotics, where both SINTEF and NTNU participate. The initial version of the lab facility was complete in 2006, but the lab is continuously being further developed. The robot manufacturer KUKA has supplied the robotic system installed in the lab. |
| |